Why do we need trajectory optimization?
Today’s economy is facing tough competition at increased scarcity of resources in a more and more globalized world. In order to improve efficiency and to reduce cost it is of utmost importance to exploit the full potential of a dynamic system, be it a car, a single aircraft or even the whole traffic at an airport. And when trying to achieve peak performance with a given dynamic system, numerical optimization is inevitable to generate verifiable results, enabling countless new applications.
To gain a deep understanding of optimization theory and to improve real world applications, the Institute of Flight System Dynamics at TUM (FSD) has been conducting research in this field for several decades now. With its vast experience in numerical optimization, the trajectory optimization research group at FSD develops and applies optimal control methods especially tailored to flying systems and air traffic related problems.
The following video shows one of the applications which is the calculation of noise minimal approach routes for a generic airport surrounded by populated areas. (The video is only available in German.)
Applications
The methods developed at the institute enable a vast number of applications some of which are listed below.
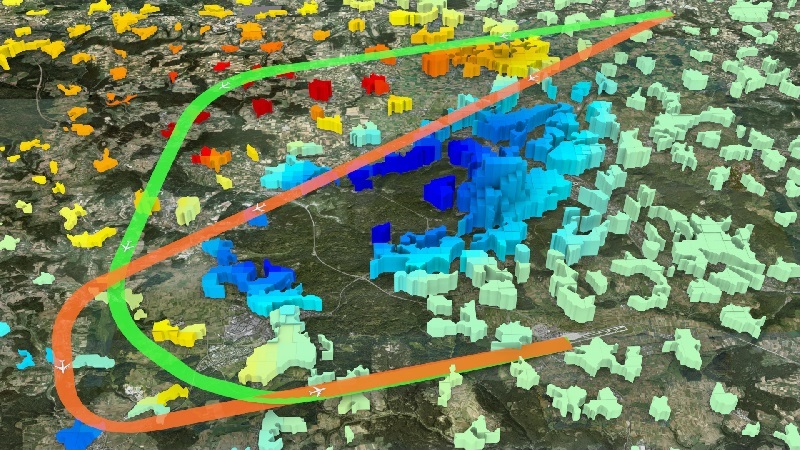
Calculation of noise minimal approach and departure routes
Today, major airports are facing more than a thousand aircraft movements a day leading to considerable impact on the surrounding communities in terms of noise and air pollution. Hence, plans for the extension of existing airports or the construction of new airports are strongly opposed by the local population. However, due to the rise of modern means of navigation (GBAS/SBAS, RNAV) it is nowadays possible to define curved approach and departure procedures instead of the conventional straight flight tracks. This allows the definition of environmentally friendly procedures that minimize e.g. the noise impact on ground.
To this end, a bi-level optimal control problem is formulated that can be solved with the optimal control framework developed at FSD. Within this bi-level optimal control problem, multiple lower level optimal control problems (OCP) representing approaching or departing aircraft are embedded in an upper level optimization framework, which determines the optimal position of procedure waypoints to minimize the noise impact on ground. At the same time, the aircraft in the lower level optimal control problems have to follow the route prescribed by the waypoints while minimizing their direct operational cost.
Optimization of air race tracks
Half Cuban eights, chicanes, high-speed turns and accelerations up to 12g! Air races are truly thrilling for the spectators and utmost challenging for the pilots but safety has to be the number one priority for the organizers. Thus, next to the possibility to calculate the fastest trajectory through a given race course, the FSD optimization framework allows to optimize the race course itself with respect to safety and other criteria. This way, it is possible to have a great and spectacular track layout while taking risk factors such as distance to crowd, directed energy, pilot blinding, etc. into account at the same time.
To achieve this, FSD built a bi-level optimal control problem, where in the lower optimal control problem the optimal race courses for different aircraft types are calculated. In the upper level optimization problem the positions of the air race gates are altered such that either the safest race course or the fairest one results. The race track is regarded as fair if the basic layout does not favor any of the participating types of aircraft. The limits for the race gate positions can in this algorithm be defined by the user and have to be chosen such that the course still remains interesting for the spectators in any case. (Website of Red Bull Air Race)

Calculation of fuel minimal trajectories
Especially airlines have a great interest in fuel optimal operations of their fleet for cost reduction. Such fuel minimal trajectories can be calculated using the optimal control framework developed at FSD. In this application it is of primary importance to take care for all aircraft related envelope constraints as well as all regulatory constraints. These constraints may be waypoints, maximum or minimum altitude limits or any other restrictions published in the approach or departure charts or any other respective documents.
Optimization of ATM scenarios
In 2005 the European Commission set the following high-level goals for the “Single European Sky” to be met by 2020:
- Enable a 3-fold increase in air traffic capacity
- Improve safety by a factor of 10
- Enable a 10% reduction in the effects flights have on the environment
- Provide ATM services to the airspace users at a cost of at least 50% less
To achieve this goal, huge research programs (e.g. SESAR and NextGEN) have been initiated to shape the future of Air Traffic Management. One of the general trends is the increasing use of automation in this field, where the main question to be solved is how to safely and efficiently bring as many aircraft as possible through a given airspace. At FSD, optimization theory is used to guide multiple aircraft through a given sector and minimize the environmental impacts or the operational costs for the airlines.
Of course, safety has the highest priority and separation constraints have to be guaranteed at any time.
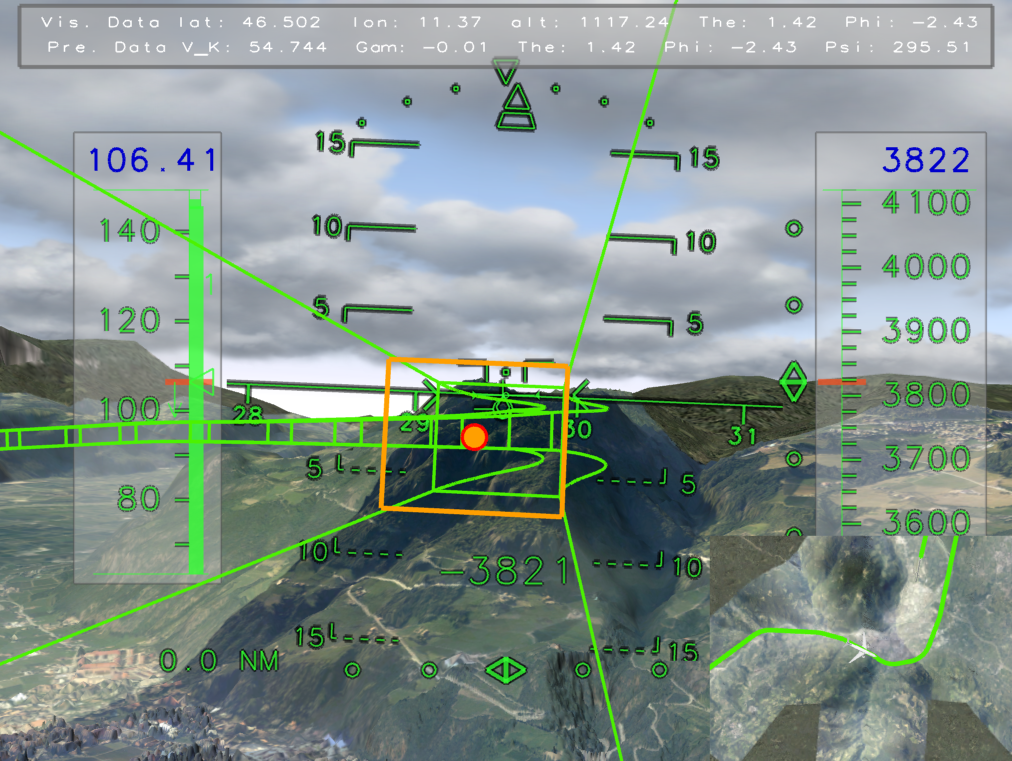
Tunnel in the Sky
The optimization methods developed at the institute have been used to calculate optimized approach and departure routes that were used in the market offered tunnel in the sky system 3D-Pilot developed by Aviontek.
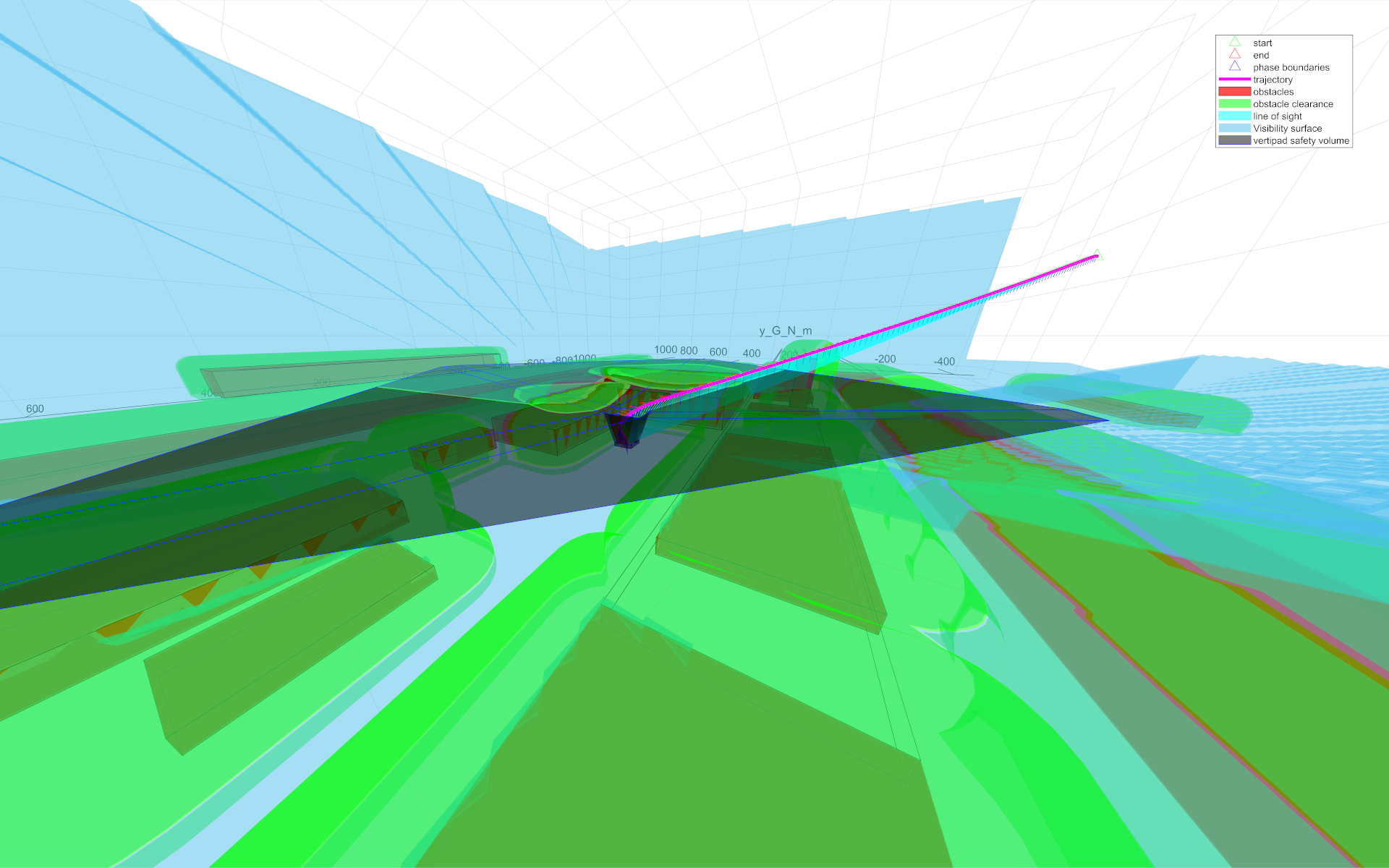
Efficient eVTOL trajectories
In the emerging Urban Air Mobility (UAM) segment, flight guidance and control will experience an unprecedented degree of automation. Our trajectory optimization group complements the flight control developments with highly automated methods and toolchains for the generation of physically feasible, safe and efficient reference trajectories. The new class of electric Vertical Take-Off and Landing (eVTOL) and transition aircraft is of particular interest here, since hover flight phases exhibit a very high power consumption compared to cruise. Optimization of critical flight phases like approach and departure is therefore key to exploiting the potential of such aircraft.
We consider realistic application scenarios with obstacle clearance, vertipad safety volumes and aircraft-specific constraints. For example, a vision-augmented automatic landing system may require maintaining a line-of-sight to the vertipad at all times, as shown in the example below.
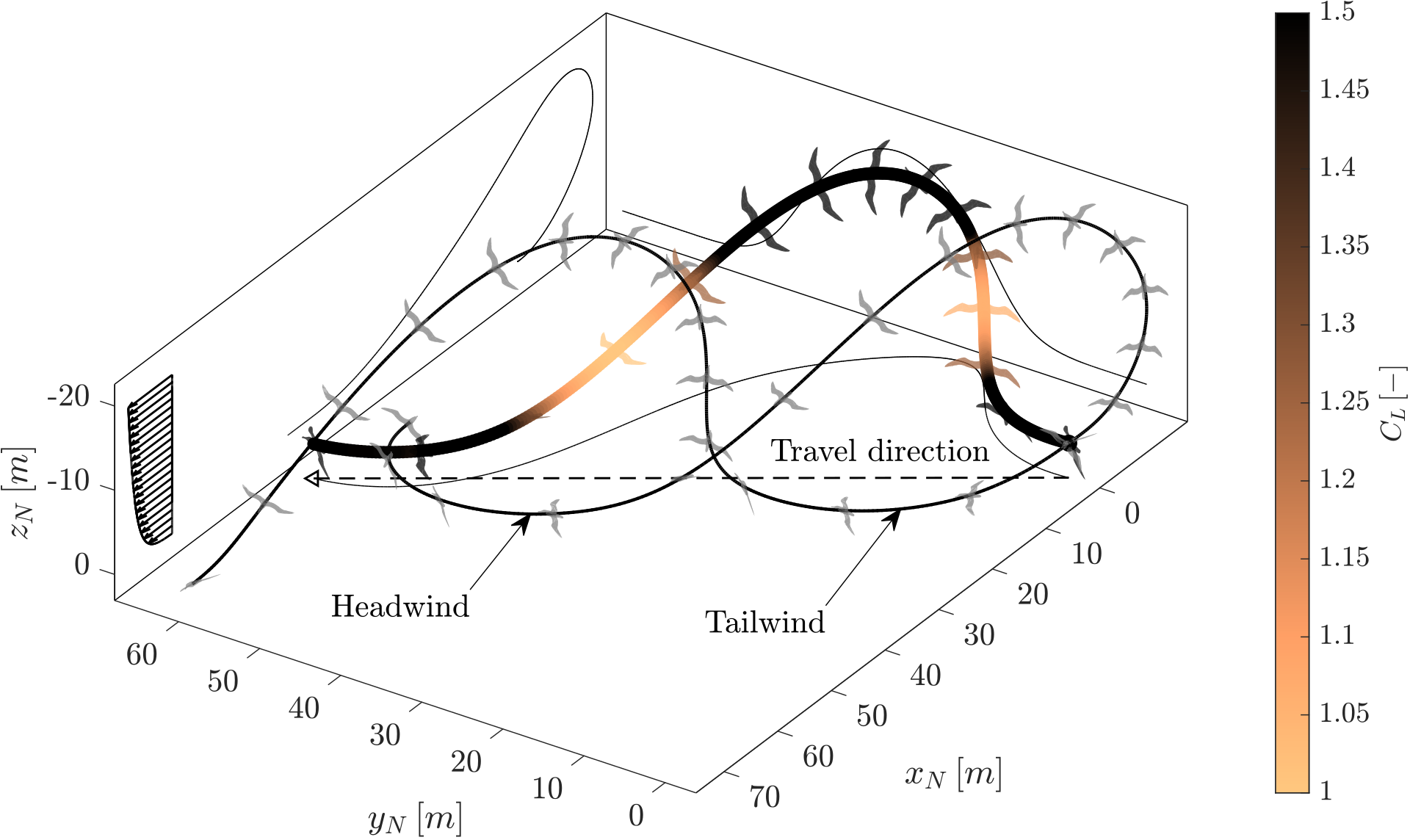
Dynamic Soaring
Seabirds, in particular the albatross, achieve exceptional endurance and range by extracting energy from the wind. In a cyclic motion they exploit strong wind shear profiles close to the surface; see below for an example. Making this concept accessible to small unmanned aircraft may pave the way towards highly-efficient long-range sensor platforms, for example. Understanding and implementing dynamic soaring heavily depends on trajectory optimization.
Methods
The aircraft trajectory optimization group at the Institute of Flight System Dynamics develops and maintains the optimal control toolbox FALCON.m that can be used to solve trajectory optimization problems from various application domains. This includes aircraft trajectory optimization as well as other areas like optimal robot control or optimal trajectories for ground based vehicles. The framework has been developed in MATLAB® and allows the use of model dynamics implemented in Simulink® as well.
Direct discretization methods
For the solution of optimal control problems, the framework described before allows the use of different direct discretization schemes like direct single shooting, direct multiple shooting and direct collocation with different integration schemes. For the solution of the resulting numerical optimization problems currently SNOPT, IPOPT, WORHP or the MATLAB internal solver fmincon can be used.

Bi-Level optimal control
Besides the possibility to solve regular optimal control problems in the optimal control framework developed at FSD, the code is capable of solving so called Bi-level optimal control problems. In this class of problems, the solution of an upper level parameter optimization problem depends on the optimal solution of one or multiple lower level optimal control problems. Where the dependence of the optimal solution of the lower level problem on the upper level optimization parameters is efficiently computed using the post-optimal sensitivity analysis.
Optimal control problems including discrete controls and decisions
A special class of optimal control problems are so called MINLP problems (Mixed Integer Non-Linear Programming). In these problems not only continuous values like the control and state histories are sought but additional discrete controls or decisions are to be determined. For flight systems this is especially relevant when discrete controls are involved in the optimization process like the flaps settings or the gear positions that can only take predefined positions with no intermediate values allowed. Next to standard approaches like multiple-phase formulation and approximation using the hyperbolic tangent, the optimal control framework directly supports sophisticated methods such as outer and inner convexification to deal with MINLP, which are at the user’s disposal.
Contact us
You want to learn more about what we are doing or you are interested in cooperating with us?
Contact any one of us: Tuğba Akman, Samuel Layer-Reiss, Felix Schweighofer, Alexander Zwenig
Teaching
Every summer semester, we give a joint lecture on Aircraft Trajectory Optimization with Prof. Matthias Gerdts from Universität der Bundeswehr München, as part of the Munich Aerospace Teaching Collaboration. Every winter semester, we offer the Optimal Control Lab, a class focused on the practical software implementation of optimal control methods.
Dissertations
In descending chronological order:
- Johannes Diepolder, Optimal Control Based Clearance of Flight Control Laws, 2021.
- Patrick Piprek, Robust Trajectory Optimization Applying Chance Constraints and Generalized Polynomial Chaos, 2020.
- Christoph Göttlicher, System Identification for Aerial Applications Using Optimal Control Methods, 2019.
- Matthias Bittner, Utilization of Problem and Dynamic Characteristics for Solving Large Scale Optimal Control Problems, 2017.
- Matthias Rieck, Discrete Controls and Constraints in Optimal Control Problems, 2017.
- Florian Fisch, Development of a Framework for the Solution of High-Fidelity Trajectory Optimization Problems and Bilevel Optimal Control Problems, 2011.
Publications
In descending chronological order:
- Tuğba Akman, Felix Schweighofer, R. J. M. Afonso and Florian Holzapfel: “Robust eVTOL trajectory optimization under uncertainties – Challenges and approaches”, 2023.
- David Braun, Florian Schwaiger, Florian Holzapfel and Joseph Z. Ben-Asher: “COLIBRY – A Counter Optimization Library for MATLAB”, 2023.
- Zhidong Lu, Haichao Hong and Florian Holzapfel: “Maneuverability Set Estimation and Trajectory Feasibility Evaluation for eVTOL Aircraft”, 2023.
- Alexander Zwenig and Florian Holzapfel: “Sensitivity analysis of the energy balance of dynamic soaring”, 2023.
- David Braun, Florian Schwaiger, Florian Holzapfel and Joseph Z. Ben-Asher: “Continuous Integration of Optimal Control Based Flight Control Law Clearance”, 2022.
- Daniel M. Gierszewski, Vincent Fafard, Felix Schweighofer, Patrick Piprek and Florian Holzapfel: “Toward Onboard Trajectory Optimization for Fuel-Saving Climb of Aircraft with Automatic Flight Control”, 2022.
- Haichao Hong, Patrick Piprek and Florian Holzapfel: “A Nonlinear Trigonometric Series Parameterization Approach for Smooth Trajectory Generation”, 2022.
- Christoph Krammer, Felix Schweighofer, Daniel Gierszewski, Simon Scherer, Tuğba Akman and Florian Holzapfel: “Requirements-Based Generation of Optimal Takeoff and Landing Trajectories for Electric Aircraft”, 2022.
- Gottfried Sachs and Haichao Hong: “Flight Performance Advantages of Electric Aircraft”, 2022.
- Gottfried Sachs and Haichao Hong: “Performance Enhancement of Upwind Dynamic Soaring by Thrust Augmentation”, 2022.
- Alexander Zwenig and Florian Holzapfel: “On the Initial Relative Wind Direction of Dynamic Soaring”, 2022.
- Joseph Z. Ben-Asher, E. Rimon and Johannes Diepolder: “Time Optimal Trajectories for a Mobile Robot With Acceleration and Speed Limits in the Presence of an Obstacle”, 2021.
- Nikolai Botkin, Varvara Turova, Seyedbarzin Hosseini and Florian Holzapfel: “Tracking aircraft trajectories in the presence of wind disturbances”, 2021.
- Haichao Hong, Patrick Piprek and Florian Holzapfel: “Hierarchical Parameterization for Seamless Transition Trajectory Generation”, 2021.
- Haichao Hong, Patrick Piprek and Florian Holzapfel: “Trigonometric Series-based Smooth Flight Trajectory Generation”, 2021.
- Haichao Hong, Patrick Piprek and Florian Holzapfel: “Computationally Efficient Trajectory Generation for Smooth Aircraft Flight Level Changes”, 2021.
- Gottfried Sachs and Haichao Hong: “Dynamic Soaring Supported by Engine Power in Poor Wind Conditions”, 2021.
- Gottfried Sachs and Haichao Hong: “Performance Enhancement by Wing Sweep for High-Speed Dynamic Soaring”, 2021.
- Gottfried Sachs and Haichao Hong: “Wing Sweep Effects on the Maximum Speed Performance in High-Speed Dynamic Soaring”, 2021.
- Mingkai Wang, Johannes Diepolder, Shuguang Zhang and Florian Holzapfel: “Trajectory optimization-based maneuverability assessment of eVTOL aircraft”, 2021.
- R. J. M. Afonso and Florian Holzapfel: “A Mixed Logical Dynamics Actuator Model for Optimal Control with Position and Rate Limits”, 2020.
- Tuğba Akman, Seyedbarzin Hosseini, Johannes Diepolder, Benedikt Grüter, R. J. M. Afonso and Florian Holzapfel: “Efficient Sensitivity Calculation for Robust Optimal Control”, 2020.
- Johannes Diepolder and Florian Holzapfel: “Flight Control Law Clearance Using Worst-Case Inputs Under Parameter Uncertainty”, 2020.
- Johannes Diepolder, Joseph Z. Ben-Asher and Florian Holzapfel: “Optimal Control Based Flight Control Law Clearance Using Generalized Polynomial Chaos”, 2020.
- Alexander Gerdt, Nikolai Botkin, Johannes Diepolder and Florian Holzapfel: “Viability kernel based control approach for a flight simulator model”, 2020.
- Alexander Gerdt, Johannes Diepolder, Seyedbarzin Hosseini and Florian Holzapfel: “Implementation of a Robust Differential Game Based Trajectory Tracking Approach on a Realistic Flight Simulator”, 2020.
- Benedikt Grüter, Johannes Diepolder, Matthias Bittner and Joseph Z. Ben-Asher: “Bi-level Cross Entropy Method and Optimal Control for Air Traffic Sequencing and Trajectory Optimization”, 2020.
- Patrick Piprek, Michael M. Marb and Florian Holzapfel: “Trajectory/Path-Following Controller Based on Nonlinear Jerk-Level Error Dynamics”, 2020.
- and Benedikt Grüter: “Optimal Acceleration Procedure from Launch to Maximum Speed in High-Speed Dynamic Soaring”, 2020.
- and Benedikt Grüter: “Optimal Force and Energy Management of Dynamic Soaring in Different Reference Frames”, 2020.
- Vincentius N. S. Suryo, Benedikt Grüter, Johannes Diepolder and Florian Holzapfel: “Departure Trajectory Optimization for Noise Abatement Procedure in Soekarno-Hatta International Airport”, 2020.
- Mingkai Wang, Shuguang Zhang and Florian Holzapfel: “Battery package design optimization for small electric aircraft”, 2020.
- Huixin Zheng, Patrick Piprek, Haichao Hong and Shengjing Tang: “Smooth Sub-optimal Trajectory Generation for Transition Maneuvers”, 2020.
- Joseph Z. Ben-Asher, Michael Wetzler and Johannes Diepolder: “Optimal Trajectories for a Mobile Robot with Bounded Accelerations in the Presence of a Wall or a Bounded Obstacle”, 2019.
- Johannes Diepolder and Florian Holzapfel: “Optimal Disturbance Generation for Flight Control Law Testing”, 2019.
- Benedikt Grüter, David Seiferth and Florian Holzapfel: “Emergency Flight Planning using Voronoi Diagrams”, 2019.
- Benedikt Grüter, Francisco Sevilla and Florian Holzapfel: “Parameter Envelope for Safe Emergency Landing Using Pareto Optimal Control”, 2019.
- Patrick Piprek and Florian Holzapfel: “A Distributed Robust Optimal Control Framework Based on Polynomial Chaos”, 2019.
- Patrick Piprek and Florian Holzapfel: “Rare Event Chance-Constrained Optimal Control Using Polynomial Chaos and Subset Simulation”, 2019.
- and Benedikt Grüter: “Dynamic Soaring at 600 mph”, 2019.
- and Benedikt Grüter: “Maximum Travel Speed Performance of Albatrosses and UAVs Using Dynamic Soaring”, 2019.
- David Seiferth, Benedikt Grüter and Florian Holzapfel: “Fully-Automatic Geofencing Module for Unmanned Air Systems in Two Dimensional Space”, 2019.
- Fabian Teschner, Tuğba Akman and Florian Holzapfel: “Aerodynamic and Trajectory Studies on Optimal Earth Reentry of a Capsule”, 2019.
- Tuğba Akman, Johannes Diepolder and Florian Holzapfel: “Using Sensitivity Penalties to Robustify the Optimal Reentry Trajectory of a Hypersonic Vehicle”, 2018.
- Nikolai Botkin and Varvara Turova: “Viability Approach to Simulation of an Adaptive Controller”, 2018.
- Nikolai Botkin, Kirill Martynov and Johannes Diepolder: “Generation of dangerous disturbances for flight systems”, 2018.
- Nikolai Botkin, Varvara Turova and Florian Holzapfel: “Computation of Viability Kernels on Grid Computers for Aircraft Control in Windshear”, 2018.
- Benedikt Grüter, Johannes Diepolder, Patrick Piprek and Florian Holzapfel: “NONLINEAR MODEL PREDICTIVE CONTROL FOR OPTIMAL AIRCRAFT SEQUENCING”, 2018.
- Patrick Piprek, Franziska Glas, Xiang Fang, Veronica Bessone, Petrat Johannes and Florian Holzapfel: “Multi-Body Ski Jumper Model with Nonlinear Dynamic Inversion Muscle Control for Trajectory Optimization”, 2018.
- and Florian Holzapfel: “BI-LEVEL TRAJECTORY OPTIMIZATION BY STOCHASTIC COLLOCATION FOR UNCERTAINTY INTERVAL CALCULATION”, 2018.
- and Florian Holzapfel: “Robust Trajectory Optimization of a Ski Jumper for Uncertainty Influence and Safety Quantification”, 2018.
- and Florian Holzapfel: “ROBUST TRAJECTORY OPTIMIZATION OF VTOL TRANSITION MANEUVER USING BI-LEVEL OPTIMAL CONTROL”, 2018.
- Matthias Bittner, Benedikt Grüter and Florian Holzapfel: “A Direct Solution Approach for Multi Timescale Optimal Control Problems”, 2017.
- Matthias Bittner, Benedikt Grüter, Johannes Diepolder and Joseph Z. Ben-Asher: “High fidelity trajectory optimization using FALCON.m”, 2017.
- Nikolai Botkin, Varvara Turova, Johannes Diepolder and Florian Holzapfel: “Aircraft Control During Cruise Flight in Windshear Conditions: Viability Approach”, 2017.
- Johannes Diepolder, Matthias Bittner, Patrick Piprek and Florian Holzapfel: “Facilitating aircraft optimal control based on numerical nonlinear dynamic inversion”, 2017.
- Johannes Diepolder, Christoph Göttlicher, Benedikt Grüter, Tuğba Akman and Joseph Z. Ben-Asher: “Optimal Control Based Flight Control Law Testing with Parameter Uncertainties”, 2017.
- Johannes Diepolder, Christian David Heise, Matthias Bittner, Matthias Rieck, Benedikt Grüter and Joseph Z. Ben-Asher: “Optimal control based tracking error estimation for model reference adaptive control”, 2017.
- Johannes Diepolder, Patrick Piprek, Nikolai Botkin and Florian Holzapfel: “A Robust Aircraft Control Approach in the Presence of Wind using Viability Theory”, 2017.
- Johannes Diepolder, Patrick Piprek, Benedikt Grüter and Florian Holzapfel: “Aircraft Safety Analysis using Generalized Polynomial Chaos”, 2017.
- Johannes Diepolder, Saurabh Saboo, Venkata Sravan Akkinapalli, Stefan Raab, Jiannan Zhang, Pranav Bhardwaj, Michael Krenmayr and Florian Holzapfel: “Flight Control Law Testing using Optimal Control and Postoptimal Sensitivity Analysis”, 2017.
- Benedikt Grüter, Matthias Bittner, Matthias Rieck and Florian Holzapfel: “Bi-level Homotopic Aircraft Sequencing Using Gradient-Based Arrival Time Assignment and Direct Optimal Control”, 2017.
- Benedikt Grüter, Johannes Diepolder and Florian Holzapfel: “Integrated Bi-level Arrival and Departure Time Assignment for Optimal Trajectories”, 2017.
- Benedikt Grüter, Johannes Diepolder, Matthias Bittner and Florian Holzapfel: “Optimal Control-Based Altitude Profile Envelope for Emergency Landing”, 2017.
- and Florian Holzapfel: “Robust Trajectory Optimization combining Gaussian Mixture Models with Stochastic Collocation”, 2017.
- and Benedikt Grüter: “Dynamic Soaring – Kinetic Energy and Inertial Speed”, 2017.
- Matthias Bittner, Matthias Rieck and Florian Holzapfel: “Optimal Approach Trajectories for Multiple Aircraft Considering Disturbances and Configuration Changes”, 2016.
- Johannes Diepolder, Joseph Z. Ben-Asher, Agnes Christine Gabrys, Simon P. Schatz, Matthias Bittner, Matthias Rieck and Florian Holzapfel: “Flight Control Law Clearance Using Worst-Case Inputs”, 2016.
- Benedikt Grüter, Matthias Bittner, Matthias Rieck and Florian Holzapfel: “Optimal Sequencing in ATM Combining Genetic Algorithms and Gradient Based Methods to a Bilevel Approach”, 2016.
- Matthias Rieck, Guillermo P. Falconí and Florian Holzapfel: “Periodic Full Circuit Race Line Optimization under Consideration of a Dynamic Model with Gear Changes”, 2016.
- Matthias Bittner, Matthias Rieck and Florian Holzapfel: “Optimal Conflict Free Approach Trajectories for Multiple Aircraft”, 2015.
- Benedikt Grüter, Matthias Bittner, Matthias Rieck and Akinori Harada: “Allocation, Sequencing and Trajectory for Aircraft Using Superimposed Navigation and Optimal Control”, 2015.
- Matthias Rieck, Matthias Bittner and Florian Holzapfel: “Generation of dynamic models with automatically generated derivatives for ATM optimal control in MATLAB”, 2015.
- Matthias Bittner, Benjamin Fleischmann and Florian Holzapfel: “Optimization of ATM Scenarios Considering Overall and Single Costs”, 2014.
- Florian Fisch and Florian Holzapfel: “Optimal Scheduling of Fuel-Minimal Approach Trajectories”, 2014.
- Maximilian Richter, Matthias Bittner and Florian Holzapfel: “A Non-Cooperative Bi-Level Optimal Control Problem Formulation for Noise Minimal Departure Trajectories”, 2014.
- Maximilian Richter, Matthias Bittner and Florian Holzapfel: “A Realistic Flight Path Parameterization for Calculation of Noise Minimal Trajectories using Bi-level Optimal Control”, 2014.
- Maximilian Richter, Markus Hochstrasser, Matthias Bittner and Florian Holzapfel: “Application of MINLP Techniques to Conflict Resolution of Multiple Aircraft”, 2014.
- Matthias Rieck, Maximilian Richter and Florian Holzapfel: “Generation of Initial Guesses for Optimal Control Problems with Mixed Integer Dependent Constraints”, 2014.
- Matthias Rieck, Maximilian Richter and Florian Holzapfel: “Optimal trajectories for RPAS with discrete controls and discrete constraints”, 2014.
- Matthias Bittner, Philip Bruhs and Florian Holzapfel: “An Automatic Mesh Refinement Method for Aircraft Trajectory Optimization Problems”, 2013.
- Matthias Bittner, Christoph Hornfeck, Florian Fisch and Florian Holzapfel: “Optimization of Mid to Long Range Flights Considering Air-to-Air Refueling for Fuel Savings.”, 2013.
- Matthias Bittner and Florian Holzapfel: “Optimierung von Mittel- und Langstreckenflügen unter Berücksichtigung von Luftbetankung im zivilen Einsatz.”, 2013.
- Maximilian Richter and Florian Holzapfel: “Noise Minimal Approaches on Parallel Runways”, 2013.
- Maximilian Richter, Matthias Bittner and Florian Holzapfel: “Berechnung lärmminimaler An- und Abflugrouten”, 2013.
- and Florian Holzapfel: “Robust Noise Optimal Approach Trajectories”, 2013.
- Matthias Rieck and Florian Holzapfel: “Discrete Control Dependent Constraints in Multiple Shooting Optimal Control Problems”, 2013.
- Matthias Bittner and Florian Holzapfel: “A Multi-model Gauss Pseudospectral Optimization Method for Aircraft Trajectories”, 2012.
- Matthias Bittner and Florian Holzapfel: “Optimierung von Flugbahnen unter Berücksichtigung verschiedener Modellierungen”, 2012.
- F. Fisch, J. Lenz and G. Sachs: “On the Solution of Bilevel Optimal Control Problems to Increase the Fairness in Air Races”, 2012.
- Florian Fisch and Florian Holzapfel: “Optimal Scheduling of Fuel-Minimal Approach Trajectories”, 2012.
- Florian Fisch and Florian Holzapfel: “Aerobatic Aircraft Modeling Based on Aerodynamic Quaternions.”, 2012.
- Florian Fisch and Florian Holzapfel: “Aircraft Configuration Settings within the Optimization of Approach Trajectories”, 2012.
- Florian Fisch and Florian Holzapfel: “Increasing the Safety of Air Races by Bilevel Optimal Control.”, 2012.
- Florian Fisch, Maximilian Richter and Mirko Hornung: “Noise-Minimal Approach Trajectories in Mountainous Areas.”, 2012.
- Maximilian Richter and Florian Holzapfel: “Noise-Minimal Landing and Take-off Trajectories under Procedural and Safety Regulations”, 2012.
- Christof Büskens and Florian Holzapfel: “Post-Optimal Sensitivities of Flight Trajectories with Respect to Selected Parameters”, 2011.
- Florian Fisch and Florian Holzapfel: “Approach Trajectory Optimization including a Tunnel Track Constraint”, 2011.
- Florian Fisch, Jakob Lenz and Gottfried Sachs: “On the Solution of Bilevel Optimal Control Problems to Increase the Fairness in Air Races.”, 2010.
- Florian Fisch, Jakob Lenz and Gottfried Sachs: “Optimization of Air Race Trajectories”, 2010.
- Florian Fisch, Jakob Lenz and Gottfried Sachs: “Flugbahnoptimierung von Luftrennen”, 2009.
- Florian Fisch, Jakob Lenz and Gottfried Sachs: “Trajectory Optimization Applied to Air Races.”, 2009.
- Florian Fisch, Michael Weingartner, H. Pfiffer and Gottfried Sachs: “Airframe and Trajectory Pursuit Modeling for Simulation Assisted Air Race Planning.”, 2008.